非対称振動を用いた仮想力覚デバイスに
おける点刺激による接触手法の影響
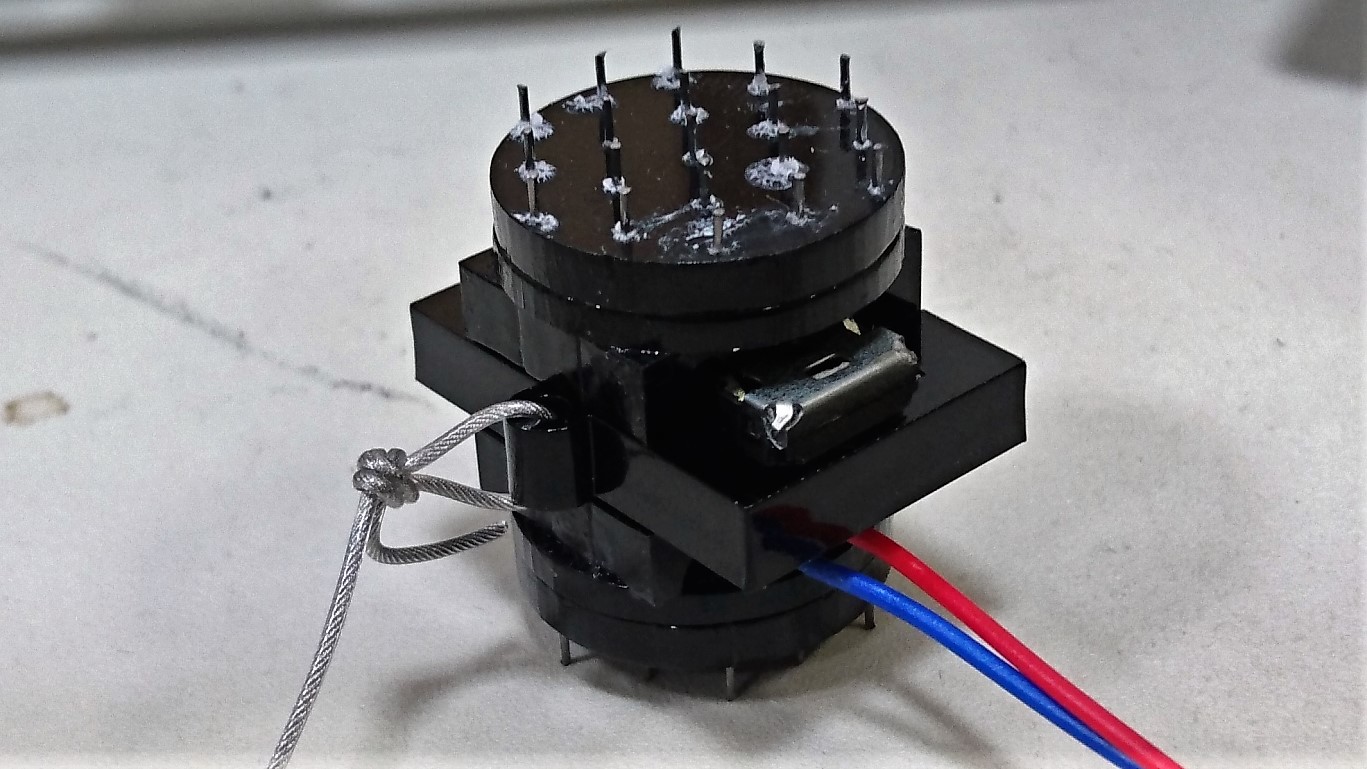
機械で反力を再現する力覚デバイスに比べて,錯覚からなる仮想力覚提示デバイスの弱点は,力覚量が小さいという点である.本研究では,仮想力覚提示デバイスからの振動をより最適に皮膚へと伝えるために接触手法を改良することで力覚量向上を図った.接触を単純化するため,ピン型の点刺激を用い,その点密度を変更することにより,力覚錯覚の一因であるパチニ小体に最適な提示手法を考察する

- Yusuke Kazashi, Hironari Matsuda, Takayuki Nakata,”Effective Contact Method without Lateral Inhibition in Virtual Force Perception Device,”International Workshop on Advanced Image Technology 2018, Chiang Mai, Thailand, Jan. 2018.
- 嘉指裕介,中田崇行,”非対称振動を用いた仮想力覚デバイスにおける点刺激による接触手法の影響,”第22回日本バーチャルリアリティ学会大会, 徳島大学, no.2D2-06, Sep. 2017.
- 嘉指裕介,松田弘成,中田崇行,”仮想力覚提示デバイスと皮膚との接触面変化による力覚量向上効果,”平成29年度電気関係学会北陸支部連合大会, 富山大学, Sep. 2017.(学生優秀論文発表賞 受賞)
- 嘉指裕介,松田弘成,中田崇行,”仮想力覚提示デバイスの力覚量向上のための振動提示手法の考察,”平成28年度学生による研究発表会, 福井高専, Mar. 2017.